Den mBot geradeaus fahren zu lassen ist schön und gut, aber sollte ein Roboter nicht auch in der Lage sein sich zu drehen? Diese Aufgabe zeigt dir wie das geht!
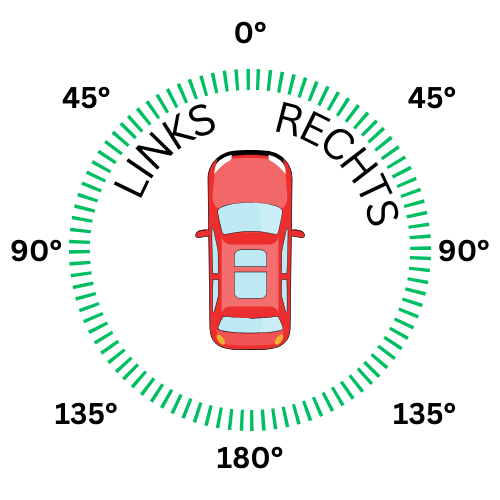
Auch hier kennst du bereits einen Teil der Aufgabe. Jetzt soll der Roboter aber am Ende der Bewegung nach rechts schauen. Die Aufgabe sagt dabei etwas von 90 ° (Grad) – warum brauchen wir plötzlich Mathematik, um den Roboter zu steuern? Ganz einfach, die Angabe des Winkels ermöglicht es uns, den mBot genau auszurichten. Stell dir vor er soll nicht komplett nach links oder nach rechts fahren, sondern benötigt feine Korrekturen, um einer Linie zu folgen – dafür benötigen wir den Winkel. Das Diagramm hilft dir zu verstehen, wie du den mBot über Winkel ausrichten kannst:
Den Block den du dazu brauchst findest du – wie auch den Befehl zum geradeaus fahren – unter MBOT2 CHASSIS:

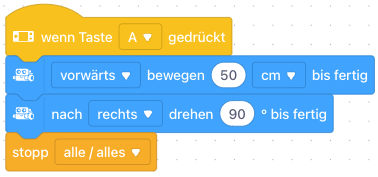
Du siehst, dass du hier die Richtung und den Winkel einstellen kannst. Füge den Block an der richtigen Stelle ein – dein Programm sollte so aussehen:
Probiere den Code aus und teste auch andere Winkel – vielleicht kannst du den Roboter jetzt schon ein wenig zum Tanzen bringen? Dieser Block ist ein wichtiger Schritt für weitere Bewegungen mit dem mBot 2! Merke ihn dir gut und nutze die Grafik, wenn du dich nicht mehr an die richtigen Winkel erinnern kannst!
Hier findest du nochmal einen Überblick der Blöcke, die du für diese Aufgabe verwenden konntest: