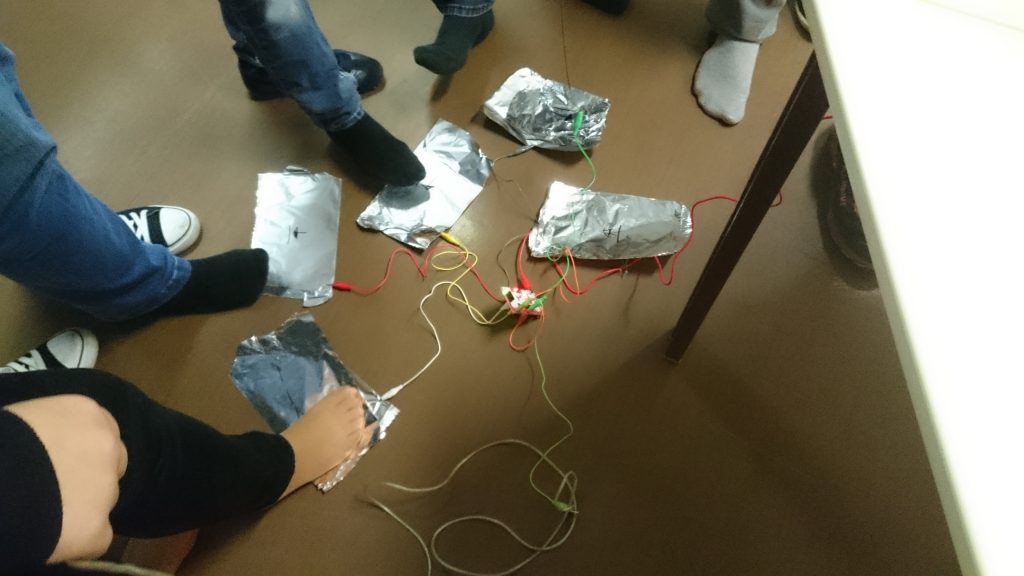
Bei diesem Projekt wurde ein vorhandenes Scratch-Projekt als Basis für eine Adaptierung anlässlich des ESC verwendet. Mache den Tanzschein verbindet so auf spielerische und kreative Weise die digitale Welt des Programmierens mit körperlicher Bewegung. Mit Hilfe des MakeyMakeys und einfachen leitfähigen Materialien (Alufolie, Kupferklebeband) bauen die Schüler*innen und Schüler ihren eigenen, interaktiven Tanzteppich.
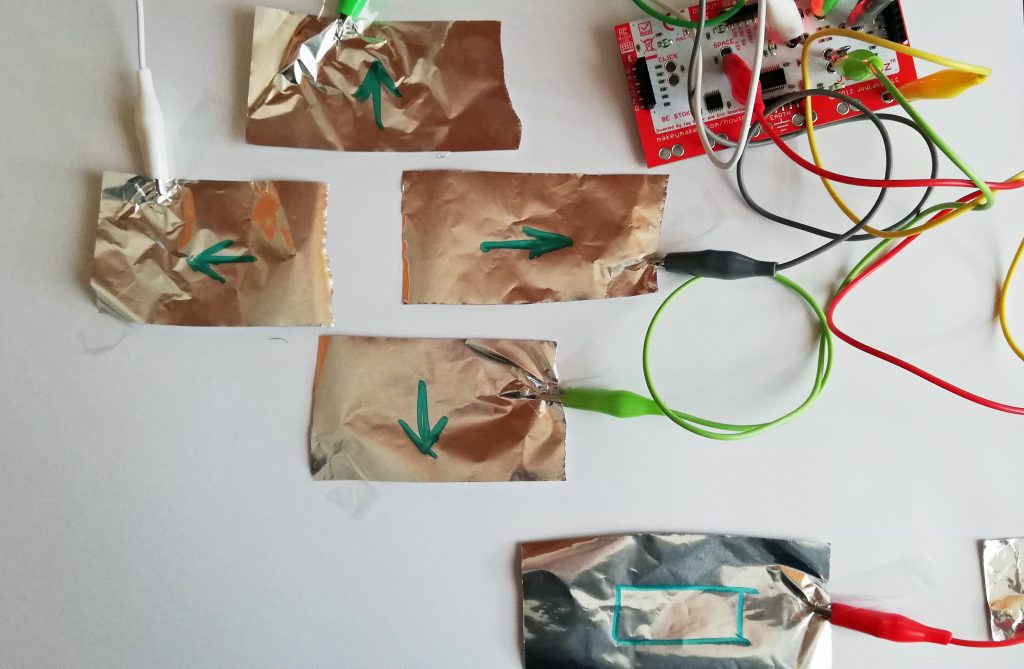
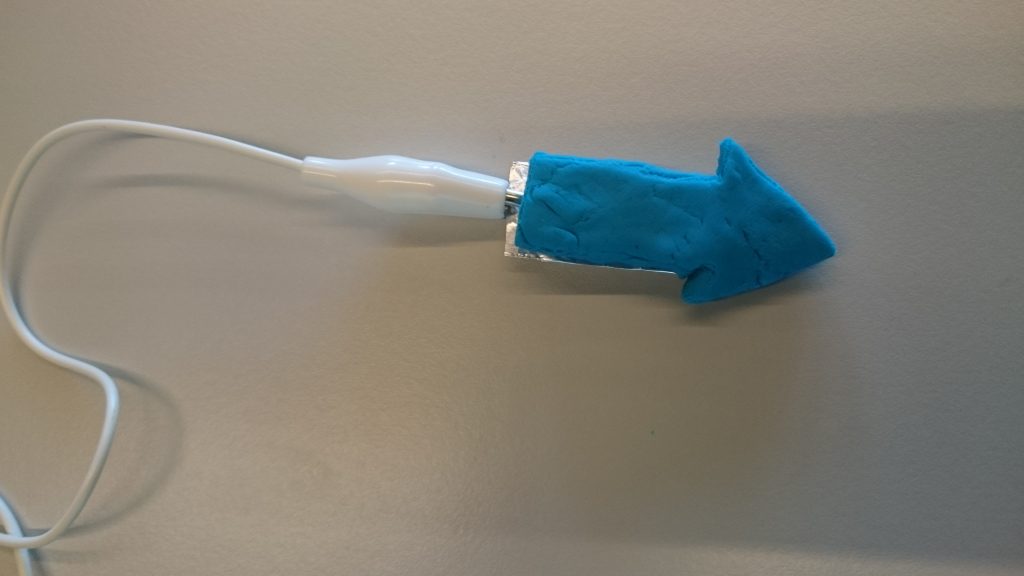
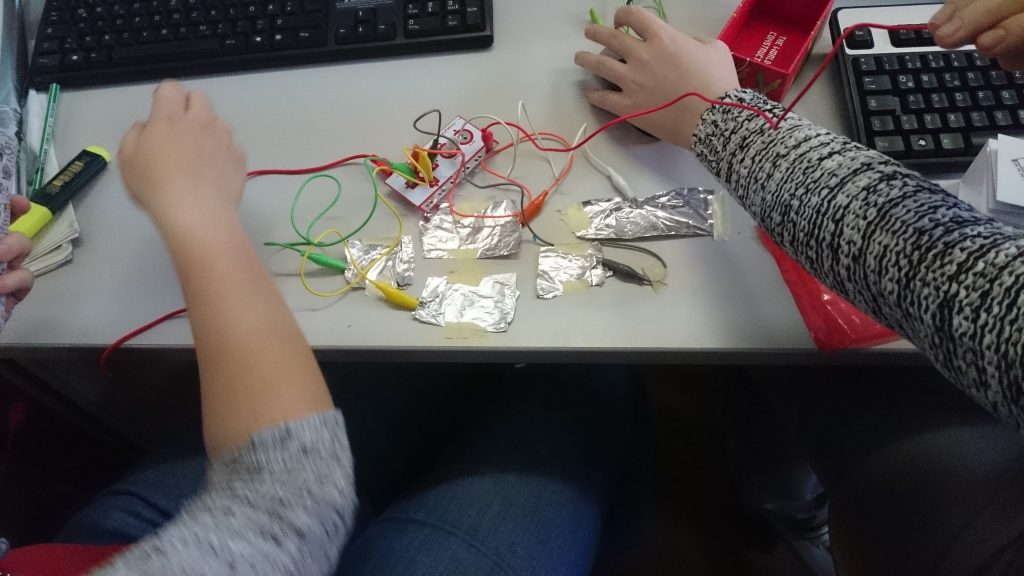
Aufbau: Vier Flächen am Boden werden für die vier Richtungen aufgeklebt, Verbindung mit den Pfeiltasten des MakeyMakey. Die Verbindung mit der Erde wird über die Hand hergestellt. Die Spielsteuerung (Start, Auswahl) erfolgte in unserem Fall herkömmlich mit der Maus.
Ablauf: Von unten erscheinen am Bildschirm die Richtungen, die mit den Füßen berührt werden sollen. Sobald diese oben angelangt sind, sollte man sie gedrückt haben. Ein Punktezähler läuft mit. Es gibt 3 verschiedene Lieder und 4 Geschwindigkeitsvarianten.
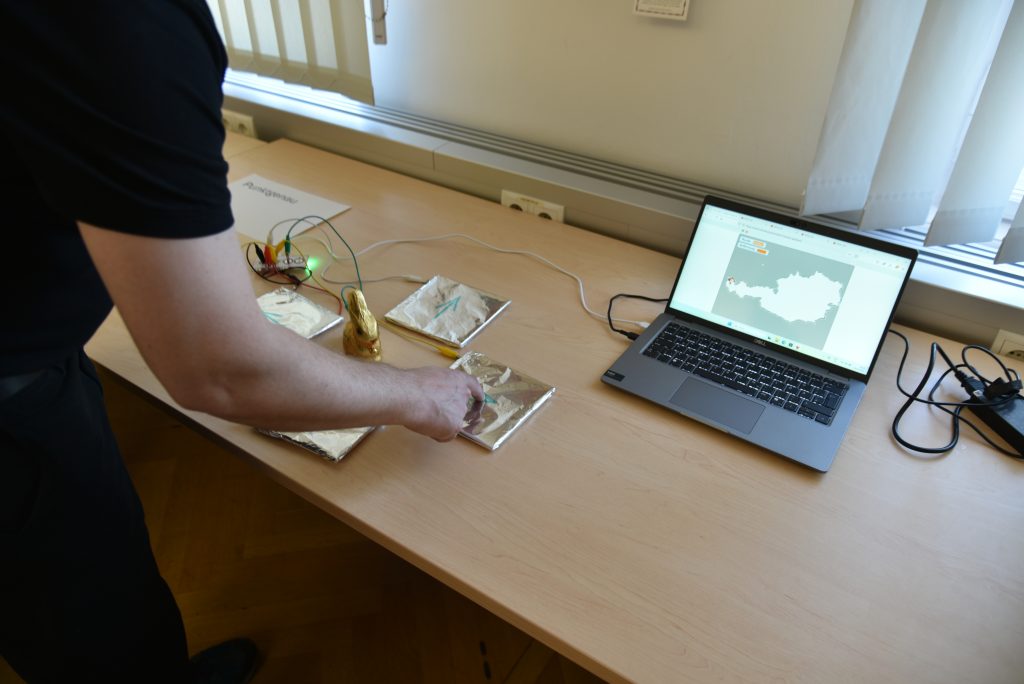
Vor Jahren gab es im ORF im Rahmen der Sendung Willkommen Österreich das Spiel Punktgenau. Eine Figur musste in einer stummen Karte möglichst genau an die Position eines gesuchten Ortes manövriert werden. Je näher man am realen Standort steht, umso besser. Mit den MakeyMakeys und mit Scratch lässt sich das gut nachbauen (einzig die Skalierung der Karte ist nicht ganz einfach).
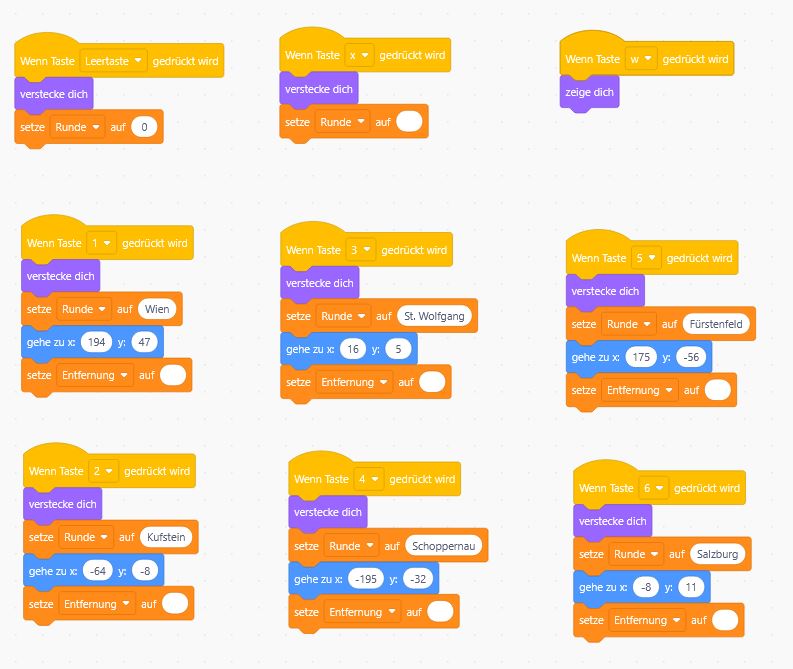
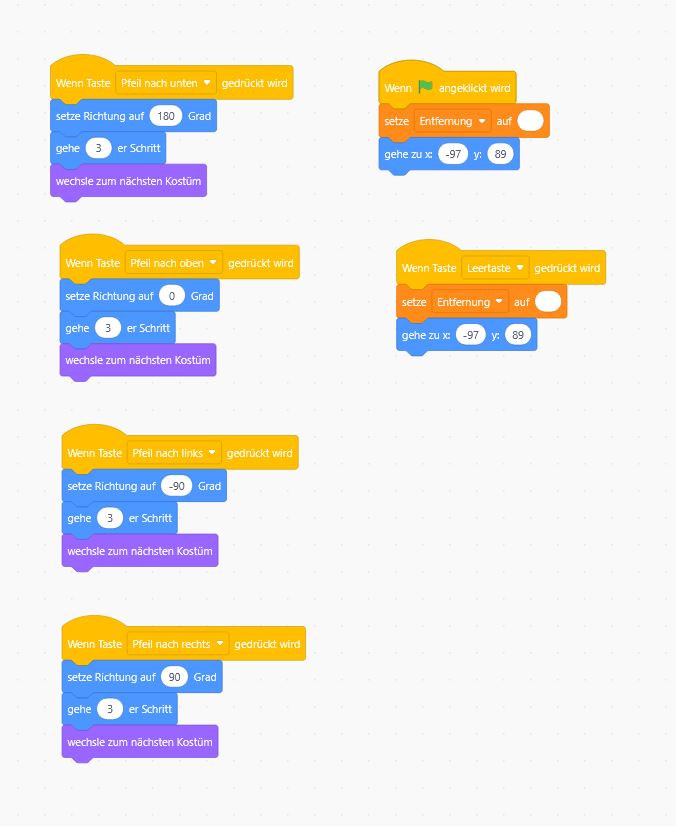
Vier Flächen stehen für die vier Richtungen (Belegung: Pfeiltasten), in unserem Fall wird der goldene Hase für das Lösen gedrückt (Taste W). Nach dem Einloggen berechnet das Programm die Entfernung von der vermuteten Stelle zum tatsächlichen Standpunkt.
In unserem Fall haben wir sechs Runden mit verschiedenen Orten in Österreich erstellt (die auch musikalisch untermalt wurden). Es sind auch bei diesem Beispiel zahlreiche Erweiterungen möglich.
Wir haben den Plan adaptiert und die Programmierung angepasst.
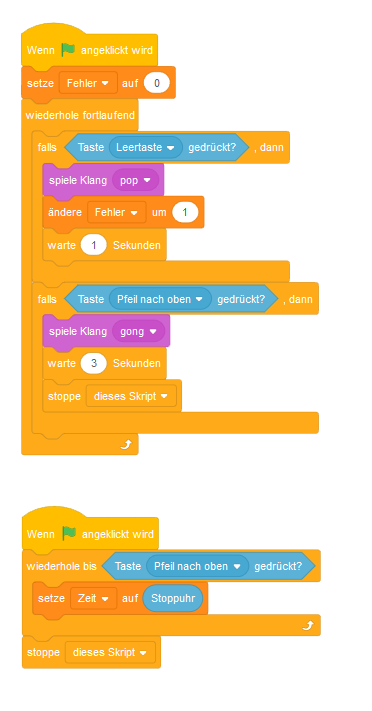
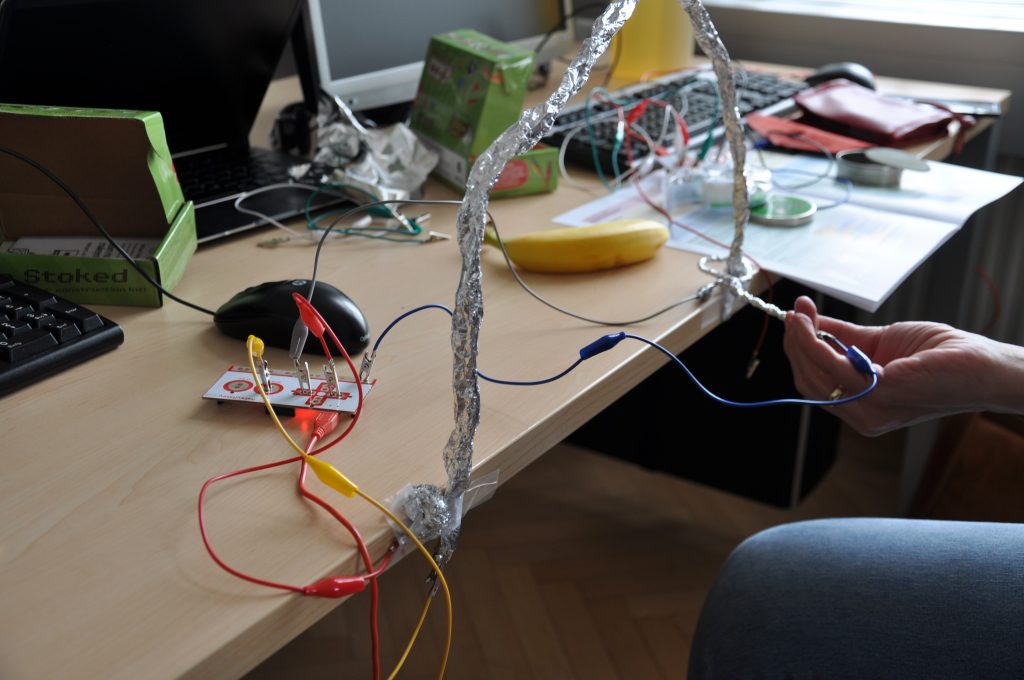
Idee: Jeweils zwei Personen spielen in zwei Teams. Mit Hilfsmitteln soll der Kontakt zwischen der Erde (Mitte) und einem der drei Punkte am Rand hergestellt werden. Das Programm gibt vor, welcher Punkt als nächstes berührt werden soll. Ein Timer legt das Zeitlimit fest.
Bei diesem Projekt ist die Programmierung in Scratch sehr einfach, der Aufbau allerdings etwas umfangreicher und man benötigt einige verschiedene Materialien.
Idee: Immer wenn ein Ballon die Decke berührt, soll ein Schlag am Schlaginstrument abgespielt werden.
Aufbau: Dafür benötigt man eine leitfähige Decke (z.B. mit Alufolie verkleidet oder andere leitfähige Platten). Diese wird mit der Erdung verbunden. Ballons werden mit Helium gefüllt, ein leitfähiges Kupferklebeband wird vom oberen zum unteren Ballonende aufgeklebt. Ein leitfähiger Faden stellt die Verbindung zum MakeyMakey her.
Programmierung: Wenn Taste gedrückt – spiele Schlaginstrument
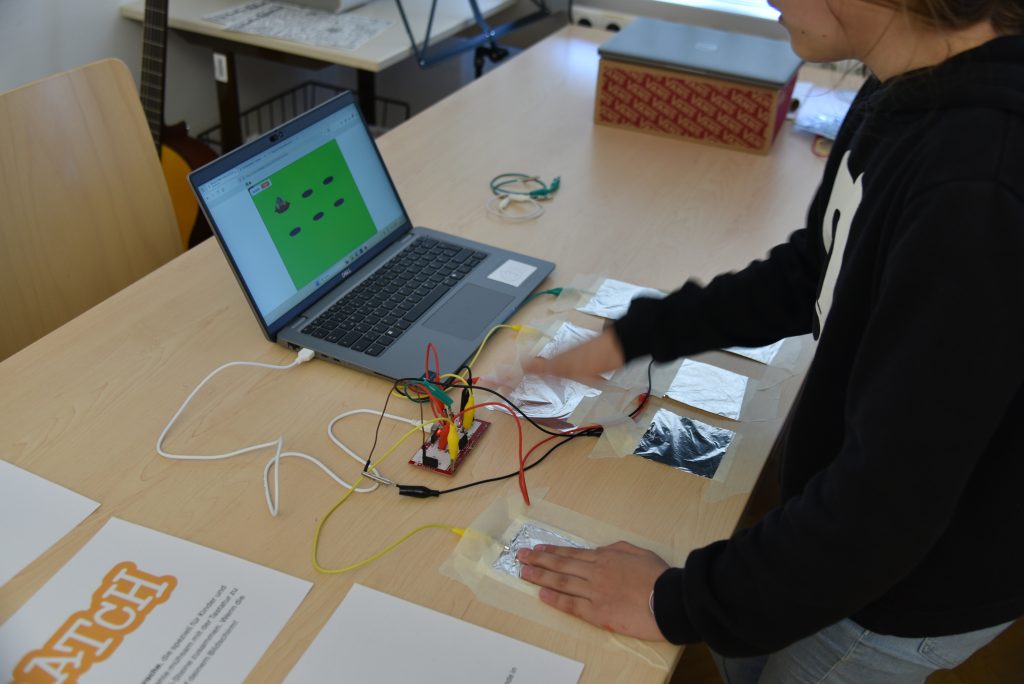
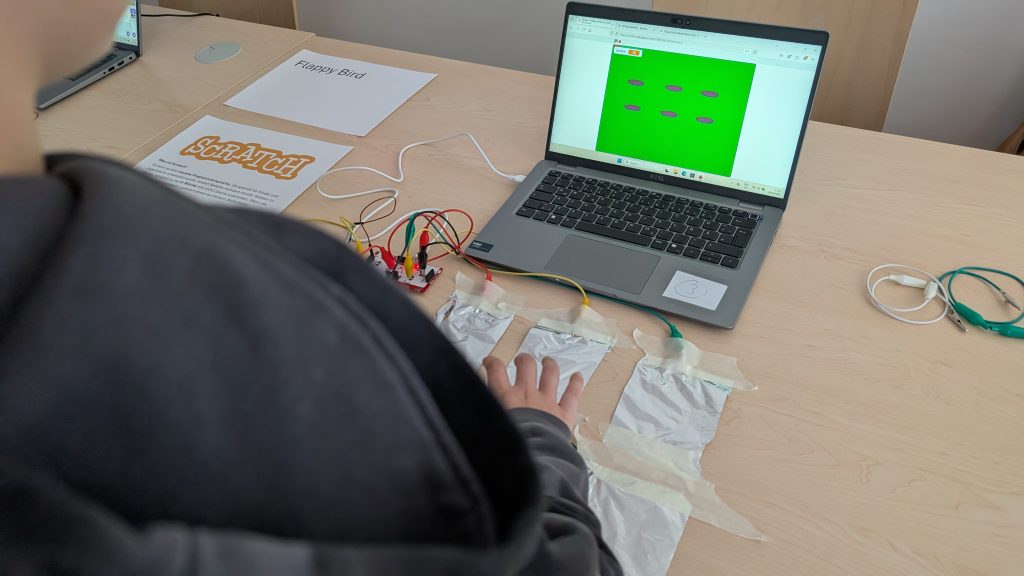
In diesem Projekt erwecken Schüler*innen den beliebten Spieleklassiker „Whack-A-Mole“ zum Leben. Die Maulwurfhügel werden in einer einfachen Variante als Flächen mit Alufolie mit dem MakeyMakey verbunden, es können aber auch 3D-Modelle gebaut werden.
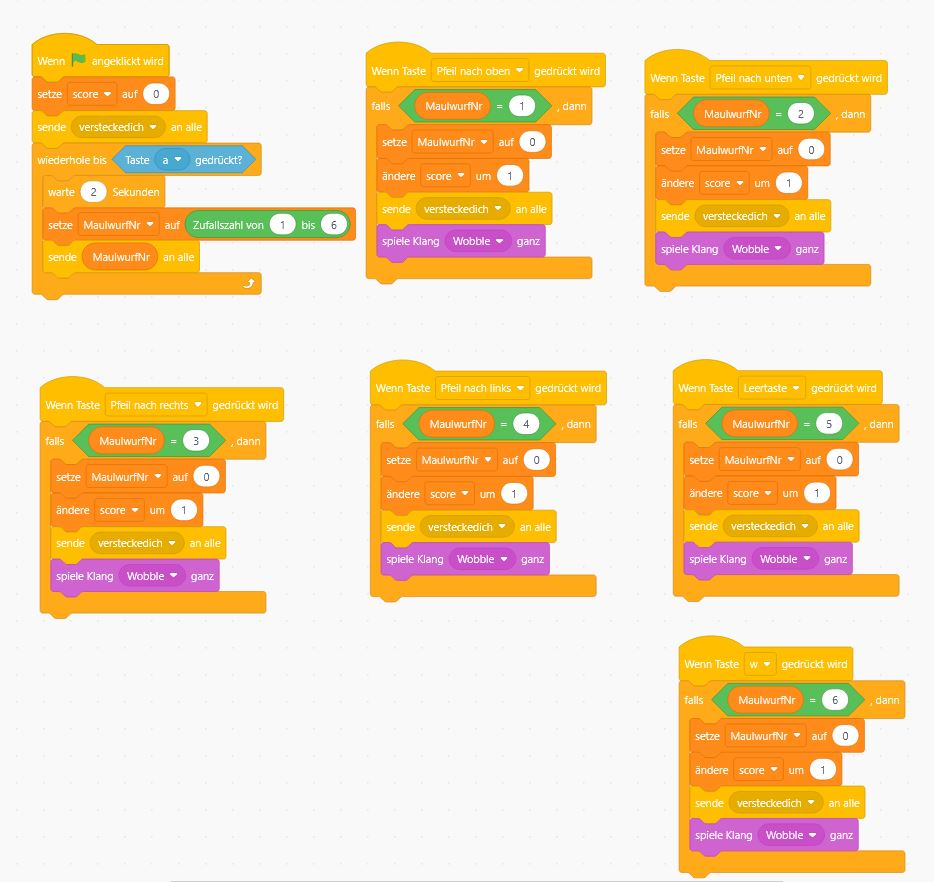
Coding: In Scratch wird das Spiel programmiert: Ein Maulwurf erscheint an zufälligen Stellen; wird die entsprechende Taste gedrückt, gibt es Punkte. Erstellen eines Zeitlimits, ev. ansteigende Geschwindigkeit, Bestenliste, etc.
Making: Die Schüler*innen bauen ein das Spielfeld. Jedes Ziel (Maulwurf) muss mit einer leitfähigen Oberfläche versehen werden.
Verknüpfung: Die Ziele werden über Krokodilklemmen mit dem MakeyMakey verbunden. Eine Erdungsfläche oder ein Armband o.ä. ist ebenfalls notwendig.
Für dieses Projekt wird ein Geschicklichkeitsspiel im Stil von „Dr. Bibber“ mithilfe von Scratch und MakeyMakey gebaut.
Materialien
Technik MakeyMakey Computer oder Laptop mit Scratch (online oder offline) USB-Kabel Krokodilklemmen (im Makey-Makey-Set enthalten) Bastelmaterial Spanplatte oder starke Pappe Alufolie Säge, Schere, Cuttermesser KlebstoG oder Klebeband Kleine Schalen oder selbst geformte Alu-Mulden Lange Pinzette aus Metall kleine Gegenstände: z. B. Pizza, Banane, Herz (Papier, Holz, Plastik)
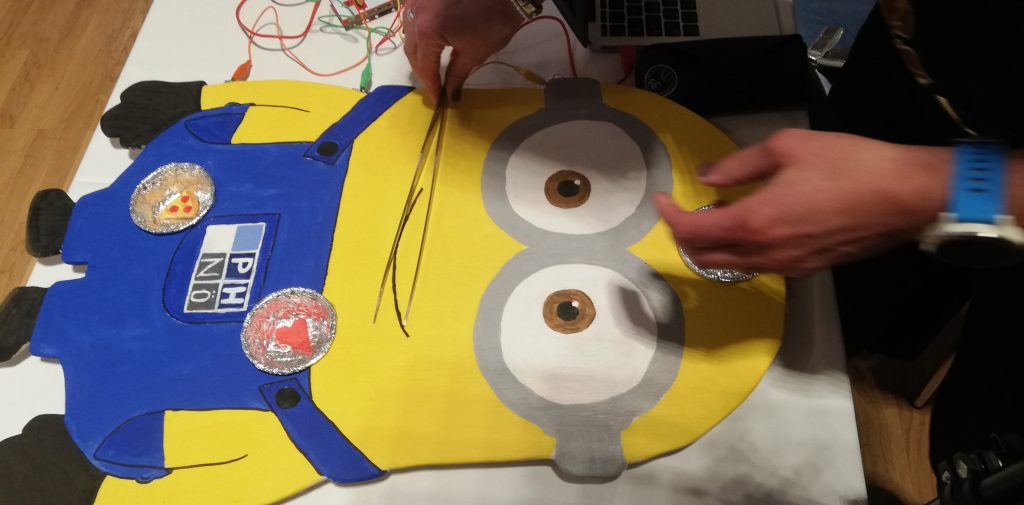
Vorbereitung der Figur Zunächst wird eine große Figur, hier in diesem Beispiel ein Minion, aus Holz oder stabiler Pappe ausgeschnitten und nach Belieben bemalt. Anschließend werden an mehreren Stellen der Figur Löcher ausgeschnitten, etwa im Brust- oder Bauchbereich. Diese ÖGnungen müssen groß genug sein, um kleine Gegenstände wie eine Pizza, eine Banane oder ein Herz hineinzulegen. Die ausgeschnittenen Löcher werden vollständig mit Alufolie ausgekleidet, sodass eine gut leitende Oberfläche entsteht. Optional können kleine Mulden oder Schälchen aus Alufolie geformt und in die ÖGnungen eingelegt werden. Auf der Rückseite der Figur werden nun schmale Streifen aus Alufolie angebracht. Jeder Streifen verbindet ein bestimmtes Alu-Loch mit einer eigenen Kontaktstelle am Rand der Figur. Dabei ist wichtig, dass sich die einzelnen Alufolienstreifen nicht berühren, damit keine unbeabsichtigten Stromkreise entstehen. An diese Kontaktstellen werden später die Krokodilklemmen des MakeyMakey angeschlossen. Zusätzlich wird eine lange Metallpinzette vorbereitet, die ebenfalls mit einer Krokodilklemme verbunden wird und als „Werkzeug“ im Spiel dient.
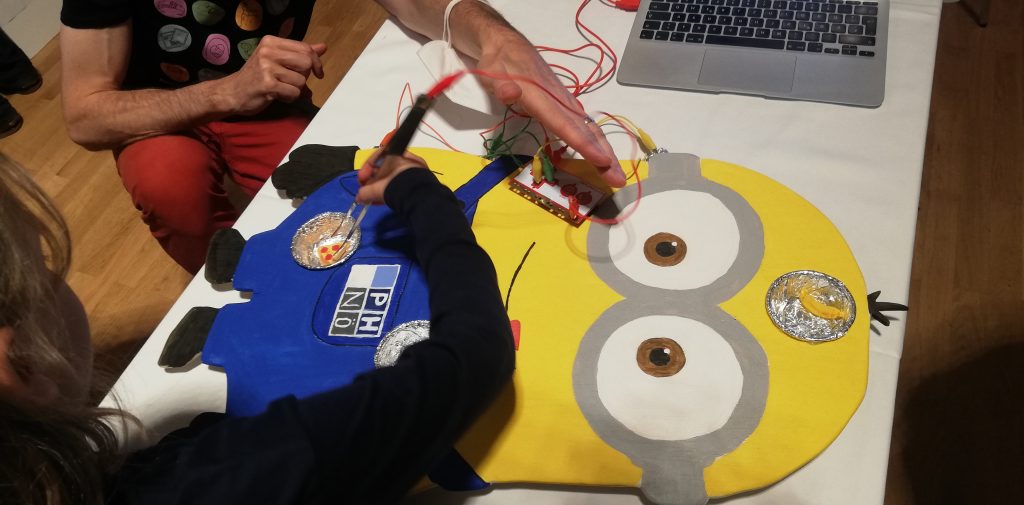
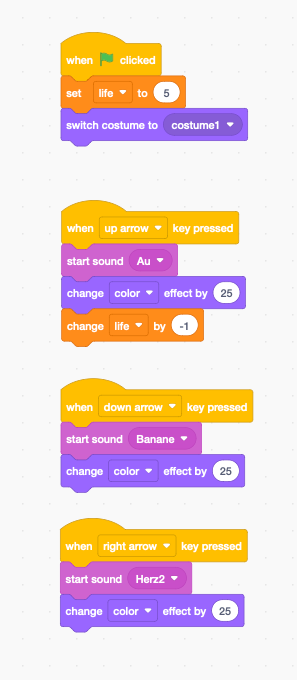
MakeyMakey Nun erfolgt der Anschluss an das MakeyMakey. Jedes mit Alufolie ausgekleidete Loch wird mit einer Krokodilklemme an einen Pfeiltasten-Kontakt des Makey Makey (zum Beispiel Pfeil nach oben, nach unten oder nach rechts) angeschlossen. Die Metallpinzette wird mit dem Erdungsanschluss (Earth/GND) des Makey Makey verbunden. Sobald die Pinzette die Alufolie in einem Loch berührt, schließt sich der Stromkreis und das Makey Makey sendet ein Tastensignal an den Computer. Scratch Parallel dazu wird das Scratch-Projekt vorbereitet. In Scratch wird eine passende Figur ausgewählt, zum Beispiel ebenfalls ein Minion, und mehrere Sounddateien werden aufgenommen, etwa „Mein Herz!“, „Meine Pizza!“ oder „Meine Banane!“. Beim Start des Spiels, sobald die grüne Flagge angeklickt wird, setzt das Programm eine Variable „Leben“ auf einen bestimmten Wert (zum Beispiel 5) und wechselt zu einem Startkostüm der Figur. Für jede Pfeiltaste wird ein eigenes Skript programmiert: Wird etwa die Pfeiltaste nach oben gedrückt, spielt Scratch den passenden Sound ab, verändert den FarbeGekt der Figur und zieht ein Leben ab. Für die anderen Pfeiltasten werden ebenfalls Sounds abgespielt und visuelle EGekte ausgelöst. Die Pfeiltasten entsprechen dabei genau den angeschlossenen Kontakten des MakeyMakey. Sind alle Verbindungen hergestellt und das Scratch-Programm gestartet, kann das Spiel beginnen.
Spielablauf Eine Spielerin oder ein Spieler versucht nun, mit der Pinzette die kleinen Gegenstände aus den Alu-Mulden zu entfernen, ohne dabei die leitfähige Alufolie zu berühren. Sobald doch ein Kontakt entsteht, reagiert das Scratch-Programm sofort: Ein passender Ruf wie „Mein Herz!“ ertönt, die Figur verändert ihr Aussehen und – je nach Programmierung – verringert sich die Anzahl der verbleibenden Leben. Auf diese Weise entsteht ein interaktives, motivierendes Geschicklichkeitsspiel, das Basteln, Technikverständnis und Programmierung sinnvoll miteinander verbindet.
Das OpenLab bietet Raum für die Umsetzung eigener Projekte und Ideen mit makingspezifischen Geräten sowie die Möglichkeit unkompliziert in dieses spannende Feld hineinzuschnuppern. Die gegenseitige Unterstützung und der Austausch zu „Making in der Schule“ steht im Vordergrund. Das OpenLab ist als didaktisch zurückhaltender Lernraum zu verstehen wo ein hohes Maß an Selbstständigkeit erforderlich ist. Gleichzeitig ist über die Betreuung im OpenLab die technische Hilfestellung gewährleistet und auch das Ausprobieren verschiedener Technologien möglich. Im OpenLab können Sie derzeit folgende Geräte verwenden. 3D Drucker- FDM, Lasercutter- CO2, Schneideplotter, Bügelpressen, Stickmaschine, Kunststoffshredder, Arbeitscomputer mit entsprechender Software.
Zweimal im Monat wird hier gemeinsam gewerkelt und getüftelt.
Rückfragen gerne an matthias.schoiswohl@ph-noe.ac.at
Termine: jeweils 12:30- 17:45 Uhr
6.3., 18.3., 27.3., 24.4.
13.5., 29.5., 10.6., 24.6.
HLG Making in der Schule, interdisziplinär und handlungsorientiert
Zielsetzung
Der Hochschullehrgang soll Studierende dazu qualifizieren die Grundprinzipien relevanter Making-Prozesse sowie Voraussetzungen für die Implementierung von Makerspaces zu verstehen und Making in der Schule und im Unterricht umzusetzen. Er soll Lehrende dazu befähigen Potenziale des Makerspace-Konzepts zu erkennen, es in ihren Unterricht zu integrieren und den Schüler*innen so neuartige Zugänge zu bieten. Die Absolventinnen und Absolventen beherrschen Making-Methoden, Applikationen sowie Makerspace-Geräte und kennen deren Relevanz für einen kompetenz- und handlungsorientierten Unterricht.
Wie der Name schon sagt, steht beim MakeyMakey das Selbermachen im Vordergrund.
Der MakeyMakey ist aus technischer Sicht ein Tastaturersatz an Stelle der Standardtastatur können die einzelnen Tasten dann Bananen, Äpfel, Plastilin, Alufolie oder Personen sein. Die Platine ist ein vereinfachter Arduino, Treiber sind nicht nötig. Auf der Vorderseite finden sich die sechs typischen Spielcontrollertasten, auf der Rückseite zusätzlich Anschlüsse mit der Belegung W, A, S, D, F, den Maustasten und Bewegungstasten. Der Einstieg erfolgt meist mit vorgegebenen Beispielen, die anschließend abgewandelt werden und schließlich Ideengeber für eigene Kreationen sein können.
dav
Jump and Run: für diese Spiele genügt es, wenn für die Pfeilschaltflächen und für die Leertaste jeweils ein Stück Alufolie verwendet wird und mit dem MakeyMakey verbunden wird.
Spannender wird es, wenn die Spiele mit mehreren Personen gespielt werden und jede/r für eine Taste zuständig ist. Die Felder können auch am Boden ausgelegt werden und man spielt mit den Füßen. Statt Alufolie geht beispielsweise auch Plastilin.
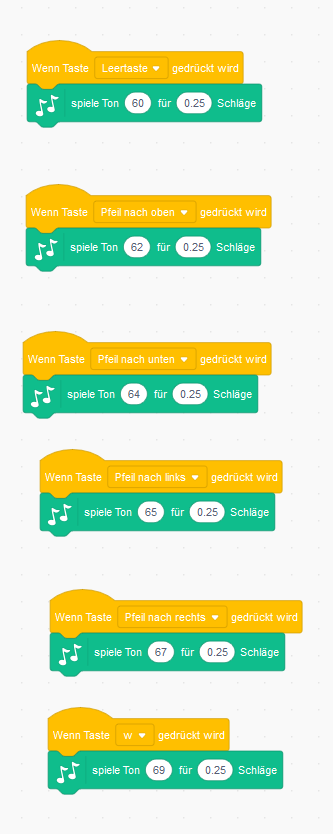
Wir kombinieren den MakeyMakey und Scratch. Für Tasten können alle stromleitenden Materialien verwendet werden, also auch Äpfel, Bananen usw. so kann man sich bspw. eine einfache Klaviatur aus Bananen bauen.
In Scratch genügt es, wenn die einzelnen Tasten mit jeweils einem Ton belegt werden. Dazu muss man die Erweiterung Musik in Scratch aktivieren.
Hier kann man dann auch mit Soundeffekten, selbst aufgenommenen Klängen und Schlagzeugeffekten experimentieren.
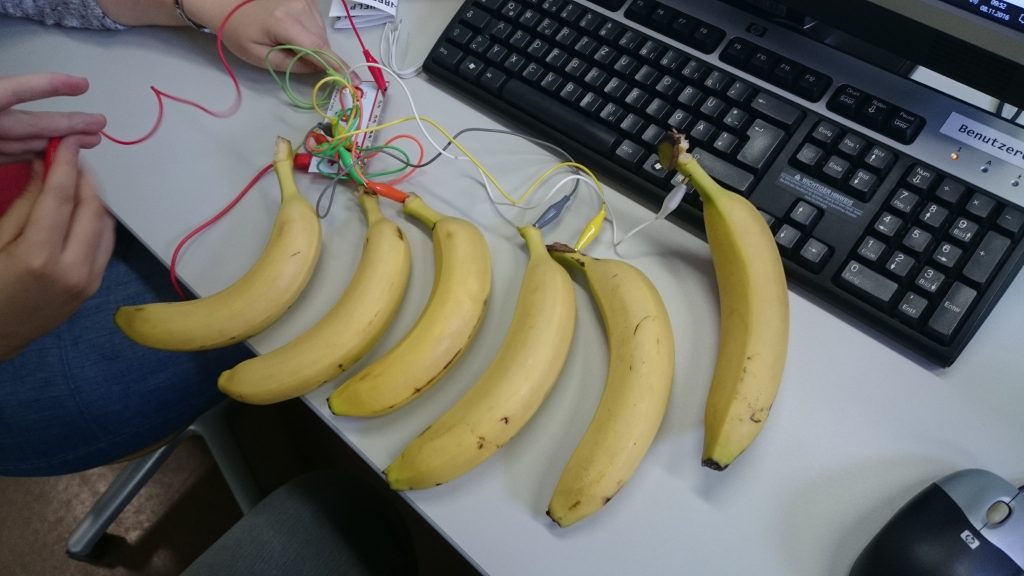
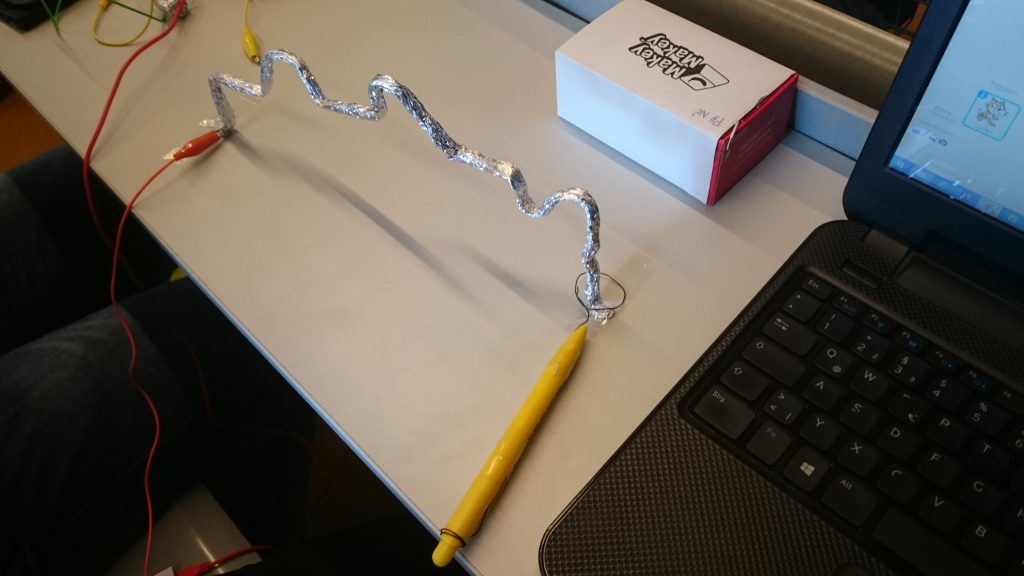
Dieses Geschicklichkeitsspiel kennst du bestimmt! Dafür benötigst du einen Parcours, diesen kannst du aus Alufolie oder mit einem Draht bauen. Dann brauchst du eine Schlaufe, die durch den Parcours bewegt werden soll. Schließlich ist noch ein Start- und ein Zieltaster vonnöten. Die Schlaufe verkabelst du mit der Erde, die restlichen Teile mit jeweils einer Taste.