Gerhard Brandhofer (PH Niederösterreich) und Wolf Hilzensauer (PH Salzburg)
1) Sequenz
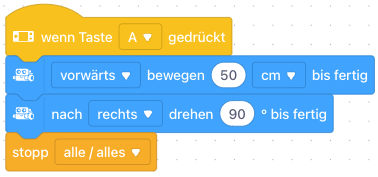
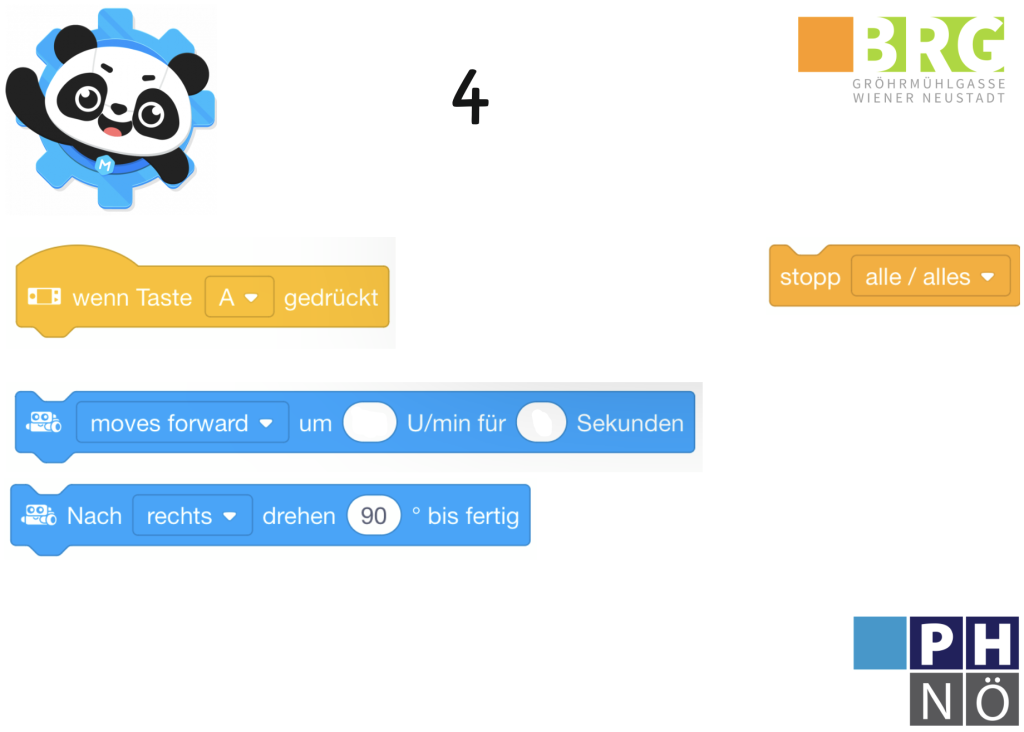
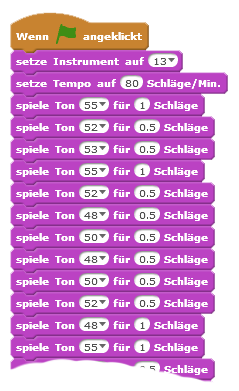
Eine Sequenz ist eine Folge nacheinander auszuführender Anweisungen. Bevor Schritt 1 nicht fertig ist, kann Schritt 2 nicht beginnen.
| Aus dem Alltag |
| Backe einen Kuchen! |
|
Für den Schneekuchen aus dem Eiklar sehr steifen Schnee schlagen und den Zucker unterrühren. Zerlassene Schokolade etwas auskühlen lassen und nach und nach mit den restlichen Zutaten vorsichtig unter den Schnee mischen. Die Masse in eine befettete und bemehlte Kuchenform füllen und im vorgeheizten Backrohr bei 160 °C ca. 50 Minuten backen. Quelle: https://www.ichkoche.at/schneekuchen-rezept-230358 |
| In Scratch |
| Spiele eine Melodie! |
 |
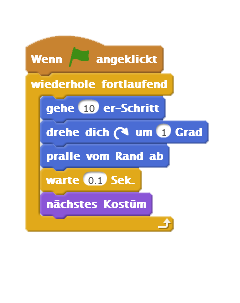
2) Schleife
Bei einer Schleife werden bestimmte Schritte mehrmals wiederholt. Es gibt Schleifen mit einer bestimmten Anzahl von Wiederholungen, endlose Schleifen und solche aus denen man rausspringen kann.
| Aus dem Alltag |
| Pflanze ein Blumenbeet! |
| Wiederhole sooft, bis das Beet voll ist: Messe einen Abstand von 10cm (entweder zum Rand oder zu den anderen Pflanzen Mache ein passendes Loch. Gib den Setzling hinein. Gleiche die Erde an. Wenn Du mit allem fertig bist, Gieße das gesamte Beet mit Wasser |
| In Scratch |
|
Ein Tiergehege
|
| http://eis.ph-noe.ac.at/scratch3/ |
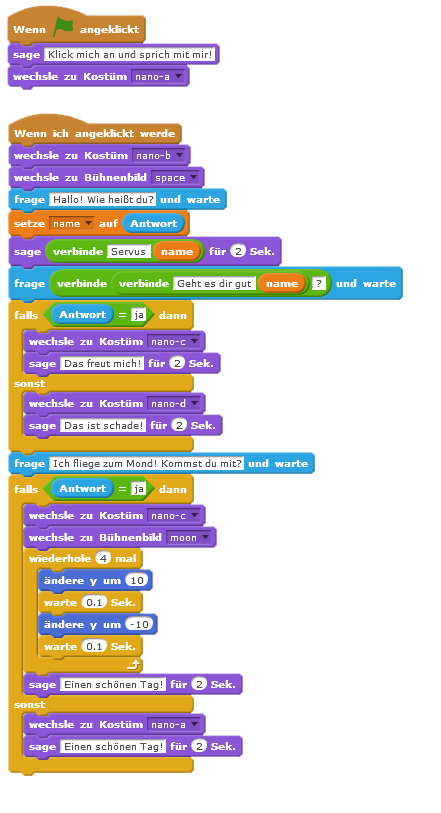
3) Verzweigung
Welcher Schritt als nächstes gemacht wird, hängt von einer bestimmten Bedingung ab.
| Aus dem Alltag |
| Das Wetter |
| Wenn es regnet, dann nehme ich morgens einen Regenschirm mit, bei Sonnenschein nicht. |
| In Scratch |
|
Ein Chatbot
|
| http://eis.ph-noe.ac.at/scratch12/ |
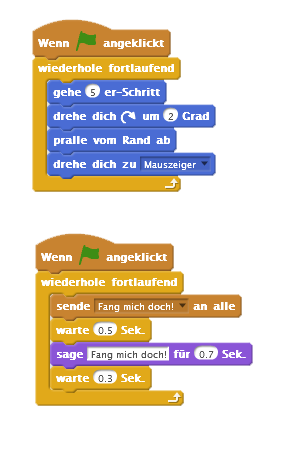
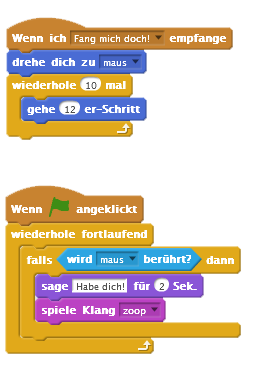
4) Kommunikation
2 Entitäten unterhalten sich miteinander.
| Aus dem Alltag |
| Spiel: Feuer – Wasser – Luft |
| Wenn die Schüler/innen ein entsprechendes Kommando/Nachricht von der Lehrperson empfangen, verhalten sie sich so, wie die jeweilige Regel es verlangt. Wenn ein/e Schüler/in gerade nichts empfängt (weil er/sie z.B. gerade aussetzen muss), können Kommandos/Nachrichten auch ignoriert werden. |
| In Scratch |
|
Katz und Maus Maus: Katze:
|
| http://eis.ph-noe.ac.at/scratch7/ |
5) Variable
Eine Variable ist ein Platzhalter für eine Zahl. Man verwendet sie in mathematischen Ausdrücken und in der informatik in Form von Buchstaben oder Symbolen. Mit ihnen kann man Zusammenhänge für Berechnungen allgemein darstellen.
| Aus dem Alltag |
| Der Preis eines Grundstücks |
| Der Gesamtpreis eines Grundstücks berechnet sich aus der „Quadratmeteranzahl“ und dem „Quadratmeterpreis“. Quadratmeterpreis kann je nach Lage des Grundstücks variieren, die Formel für den Gesamtpreis des Grundstücks ist aber unabhängig davon IMMER „Quadratmeterpreis mal Quadratmeteranzahl“. |
| In Scratch |
Punktezähler bei der Geisterjagd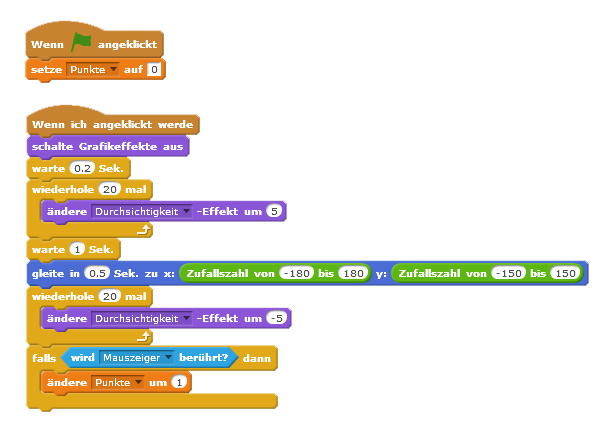 |
| http://eis.ph-noe.ac.at/scratch5/ |