BeeBot
Pädagogische Hochschule Niederösterreich
Hier finden Sie mehrere Aufgabenkarten zu Scratch für den Unterricht. Auf allen Karten befindet sich auch ein QR Code zur Lösung und zu weiteren Informationen.
„EIS Karten Scratch“ weiterlesen
| 1. oder 2. Klasse |
| Sachunterricht |
| Die Biene |
|
| Gruppenarbeiten (Kleingruppen) |
| 2 Kühe | 9 Hunde | 6 Schafe | 4 Enten |
| 10 Schlangen | 7 Hasen | 1 Katze | 3 Mäuse |
| 5 Pferde | 6 Elefanten | 8 Affen | 3 Schweine |
|
8 |
32 |
9 |
45 |
|
64 |
42 |
81 |
18 |
|
25 |
36 |
56 |
72 |
|
24 |
16 |
12 |
27 |
|
5 |
3 |
10 |
|
6 |
+ ? – |
1 |
|
8 |
4 |
0 |
|
9 |
7 |
2 |
Verschiedene Bewegungen sind abgebildet. Die Bewegung, auf die gefahren wird, wird gemeinsam ausgeführt. -> Bewegung in der Stunde oder im Turnsaal.
| 2 Kühe | 9 Hunde | 6 Schafe | 4 Enten |
| 10 Schlangen | 7 Hasen | 1 Katze | 3 Mäuse |
| 5 Pferde | 6 Elefanten | 8 Affen | 3 Schweine |
Map: ABC
Aufgabe: Jedes Kind bekommt ein kleines Raster (identisch zur Map). Die Lehrkraft gibt kurze Lernwörter vor (jedes Kind erhält ein anderes Lernwort). Die Kinder fahren den Weg auf ihren eigenen Map nach und schreiben den Weg mit Kürzel auf ein eigenes Blatt (Pfeile). Anschließend werden alle Wegnotizen unter den Kindern ausgetauscht. Die Kinder versuchen nun das verschlüsselt Lernwort nur mit Hilfe der Wegnotiz herauszufinden.
| 2 Cows | 9 Dogs | 6 Sheep | 4 Ducks |
| 10 Snakes | 7 Rabbits | 1 Cat | 3 Mice |
| 5 Horses | 6 Elephants | 8 Monekys | 3 Pigs |
|
|
What’s the weather like? |
||
|
What’s the weather like? |
windy |
cloudy |
sunny |
|
cold |
stormy |
rainy |
|
|
snowy |
hot |
foggy |
|
7 Sachunterricht
Map: Verschiedene Bauernhoftiere, Messer als verbotenes Feld, Bauernhof als Ziel
Aufgabe: Kinder müssen ein Kärtchen ziehen und geben dieses der Lehrkraft, welches die Aufgabe vorliest. Z.B. feed the pigs, feed the rabbit, go for a walk with the dog usw.
Das Kind muss den Robotoer zum richtigen Feld navigieren, darf auf keinen Fall das Feld mit dem Messer befahren. Der Bauernhof muss bei der Aufgabe „go home“ angefahren werden.
Verschiedene Instrumente wurden besprochen. Auf den Feldern sind diese abgebildet. Ein Kind spielt ein Instrument, die anderen schließen die Augen. Sie hören, was für ein Instrument es ist und fahren mit dem Beebot auf das passende Feld.
Die BeeBots sind kleine Bodenroboter. Sie werden mit wenigen Funktionstasten direkt am Gerät gesteuert. „Allgemeines zu den BeeBots“ weiterlesen
Scratch ist eine visuelle Programmiersprache, sie wurde von der Lifelong Kindergarten Group am MIT entwickelt. Viele neuere erziehungsorientierte Programmiersprachen nehmen sich das Design von Scratch als Vorbild (Snap!, Ozoblockly, Touchdevelop). „Allgemeines zu Scratch“ weiterlesen
Rechteck:
Rechteckige 8
Schwieriger:
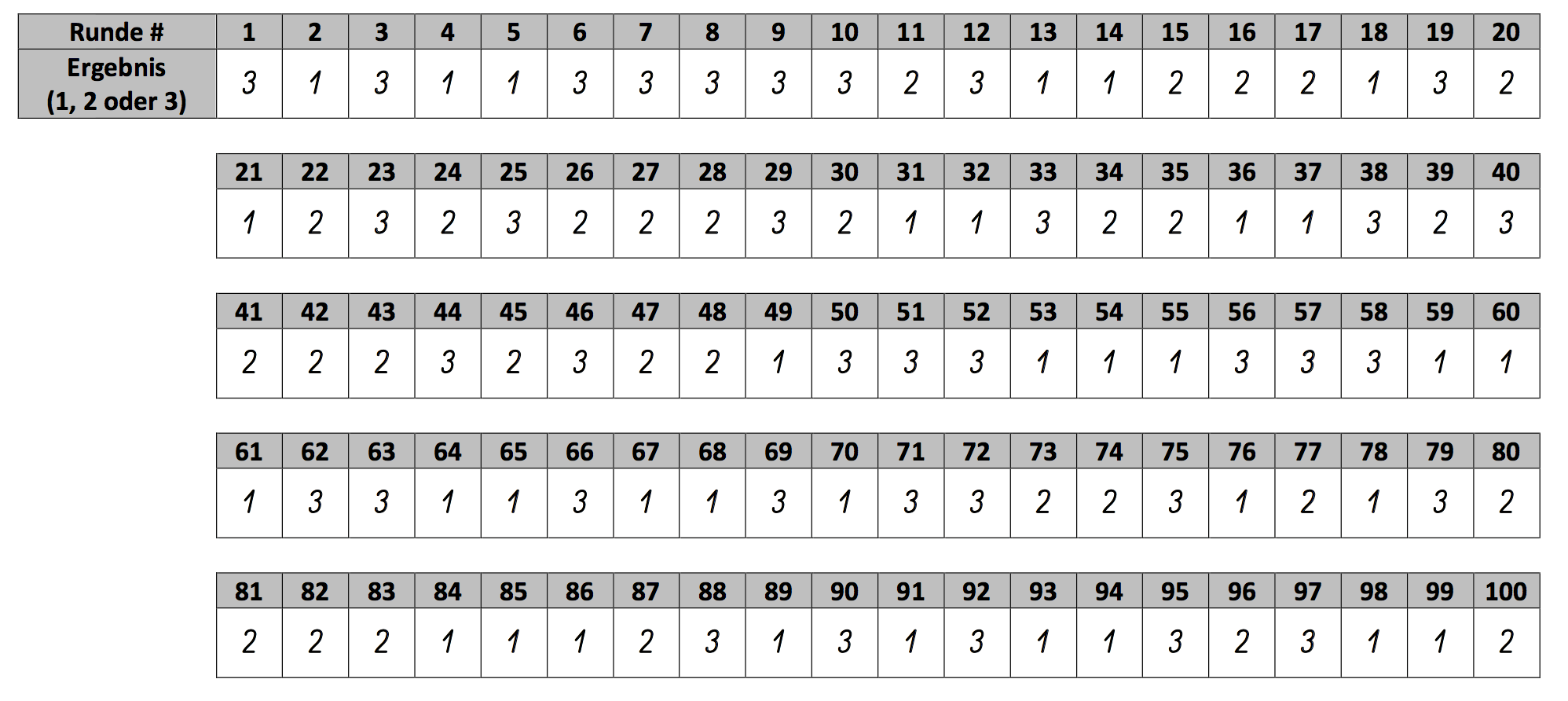
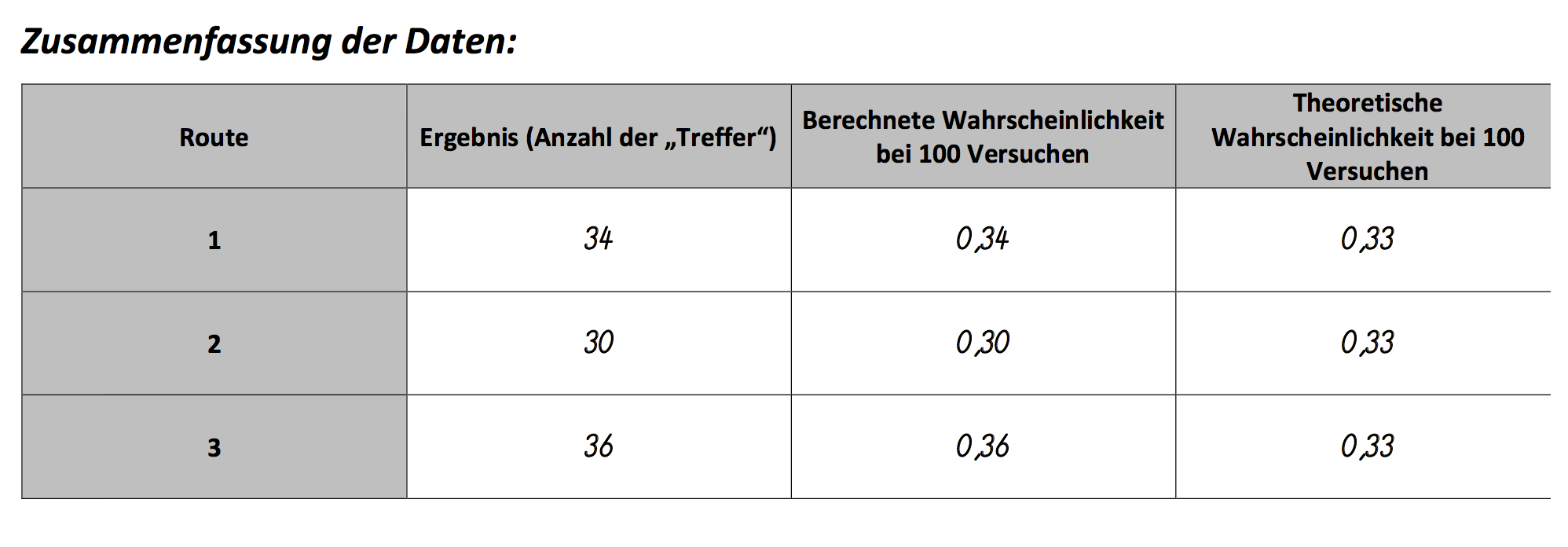
Wahrscheinlichkeiten:
Die theoretische Wahrscheinlichkeit bei 100 Versuchen für Route „1“, „2“ oder „3“ liegt bei jeweils 0,33. Es gibt insgesamt 3 Möglichkeiten („Route 1“, „Route 2“ oder „Route 3“ und somit liegt die berechnete Wahrscheinlichkeit bei 100 Versuchen bei 1/3 oder eben 0,33.
Bei deinem Versuchsprotokoll (ausgefüllte Tabelle) kann das natürlich auch ein wenig anders aussehen (s. Beispiel).
Richtungswahl im Bereich B:
Codes:
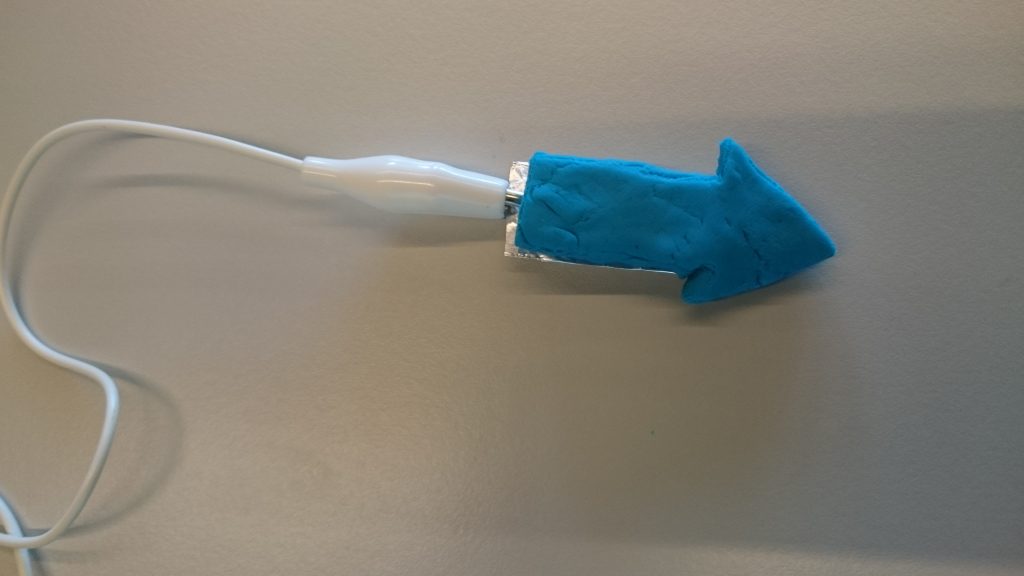
Wie der Name schon sagt, steht beim MakeyMakey das Selbermachen im Vordergrund.
Der MakeyMakey ist aus technischer Sicht ein Tastaturersatz an Stelle der Standardtastatur können die einzelnen Tasten dann Bananen, Äpfel, Plastilin, Alufolie oder Personen sein. Die Platine ist ein vereinfachter Arduino, Treiber sind nicht nötig. Auf der Vorderseite finden sich die sechs typischen Spielcontrollertasten, auf der Rückseite zusätzlich Anschlüsse mit der Belegung W, A, S, D, F, den Maustasten und Bewegungstasten. Der Einstieg erfolgt meist mit vorgegebenen Beispielen, die anschließend abgewandelt werden und schließlich Ideengeber für eigene Kreationen sein können.
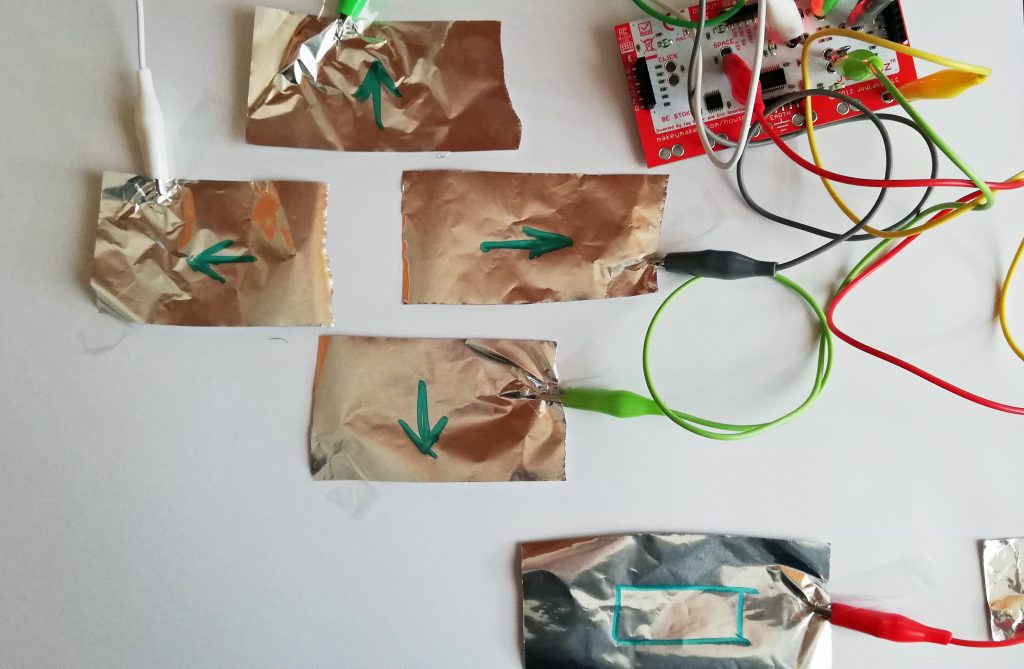
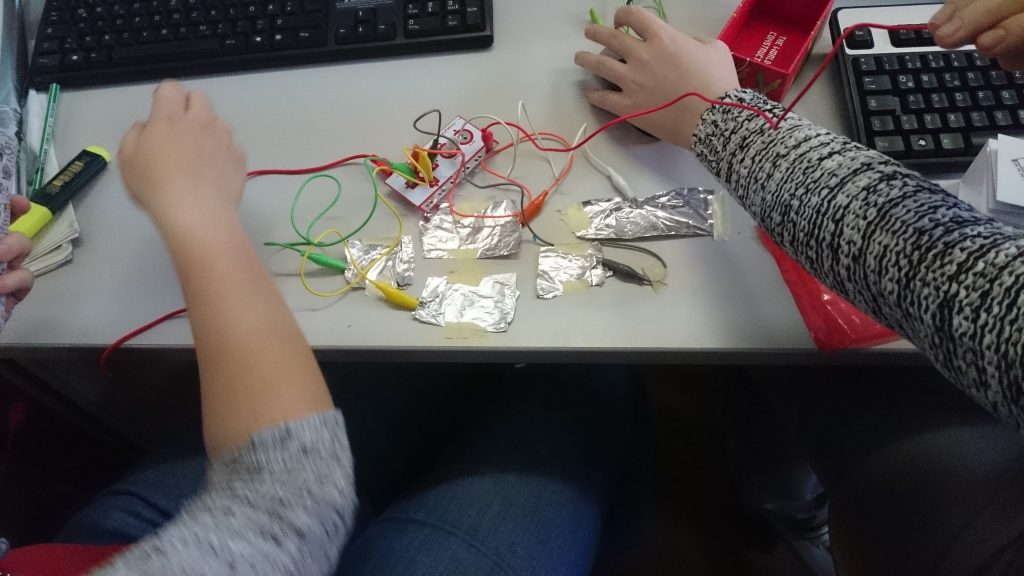
Jump and Run: für diese Spiele genügt es, wenn für die Pfeilschaltflächen und für die Leertaste jeweils ein Stück Alufolie verwendet wird und mit dem MakeyMakey verbunden wird.
Super Mario: https://scratch.mit.edu/projects/31583772/
Flappy Bird: https://scratch.mit.edu/projects/38729886/
Pacman: https://scratch.mit.edu/projects/14608394/
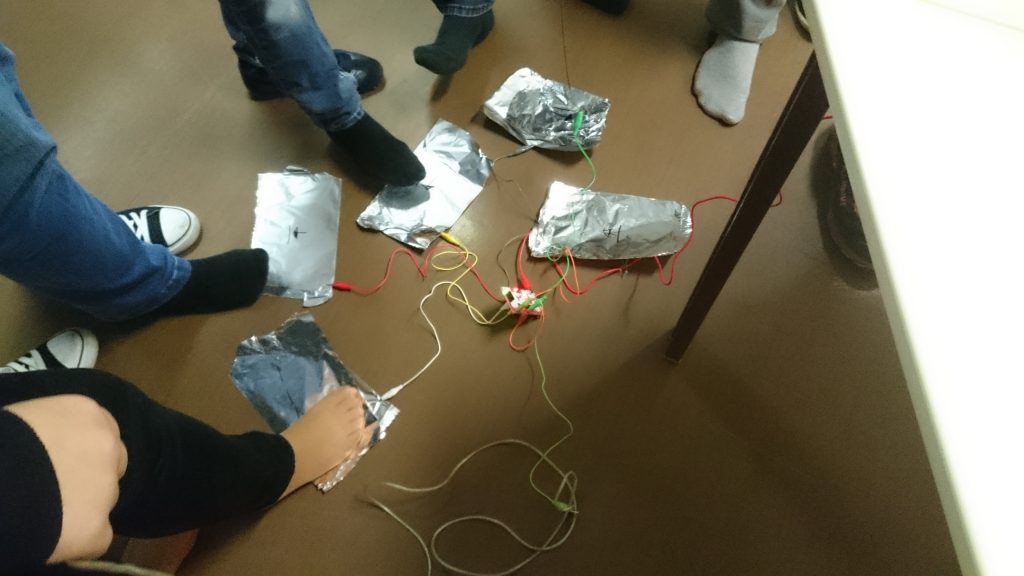
Spannender wird es, wenn die Spiele mit mehreren Personen gespielt werden und jede/r für eine Taste zuständig ist. Die Felder können auch am Boden ausgelegt werden und man spielt mit den Füßen. Statt Alufolie geht beispielsweise auch Plastilin.